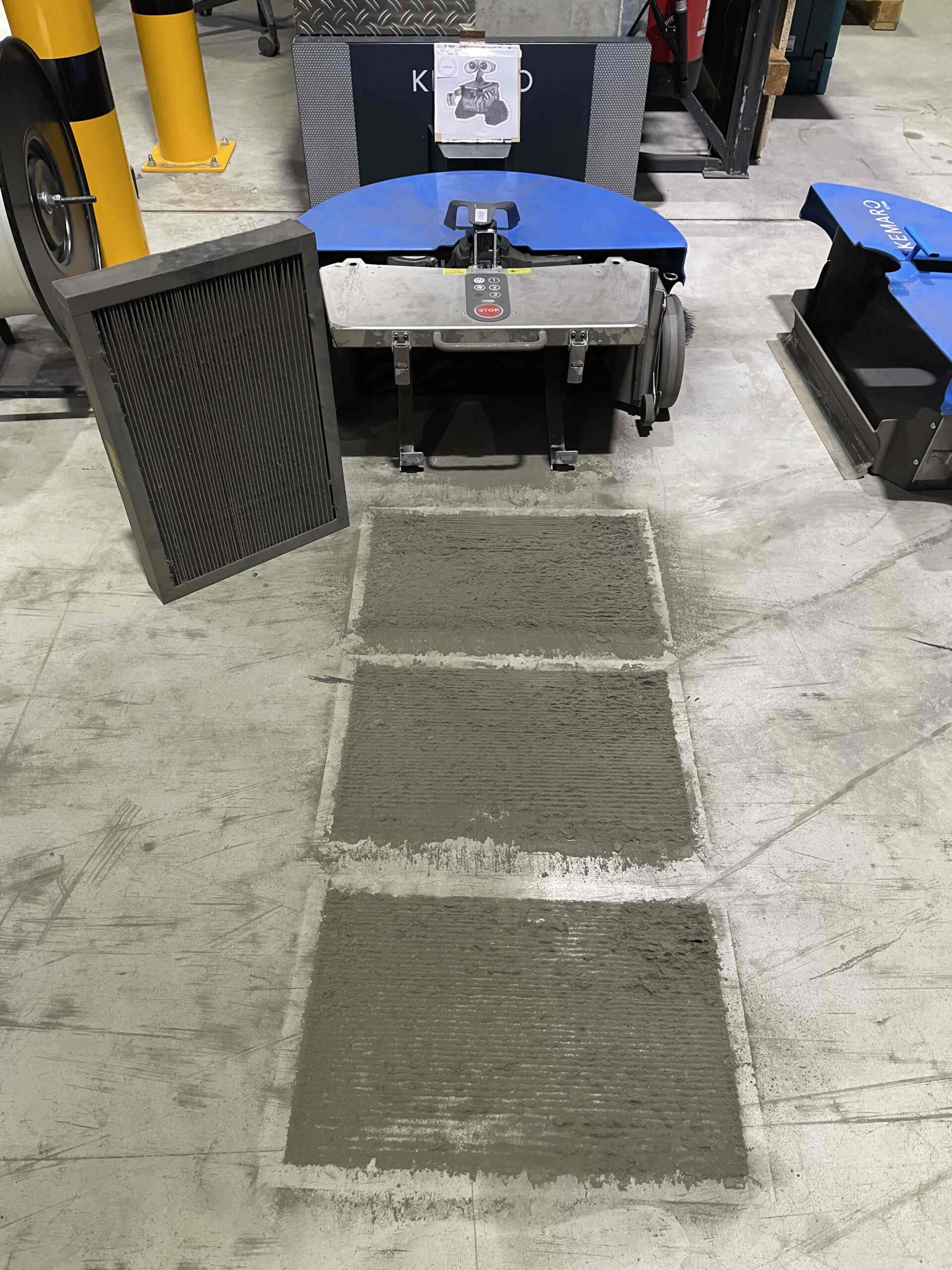
Hochleistungsabsaugung Feinstaubergebnis einer Nacht - Staplerreifenabriebe
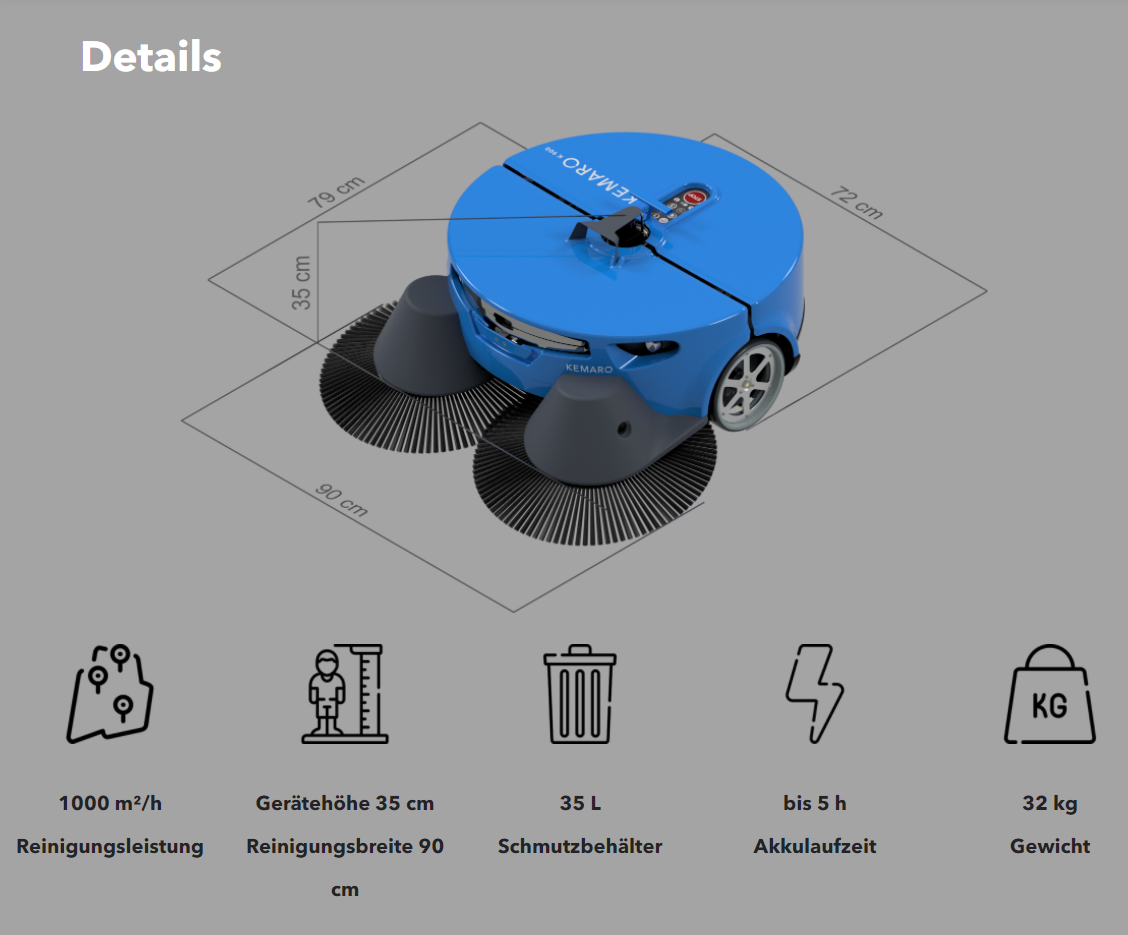
autonom unter Maschinen < 35cm
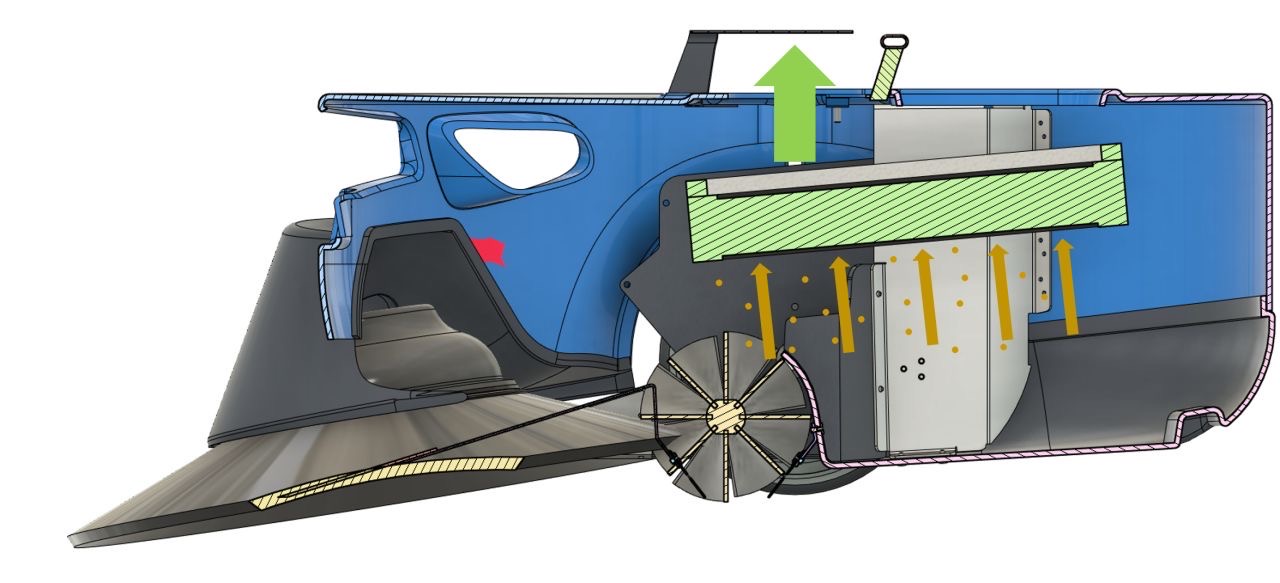
Querschnitt Absaugung mit Filter
mobile Bereichsabgrenzung
Ladestation mit 2D Codes für Raum und Reinigungsauftrag
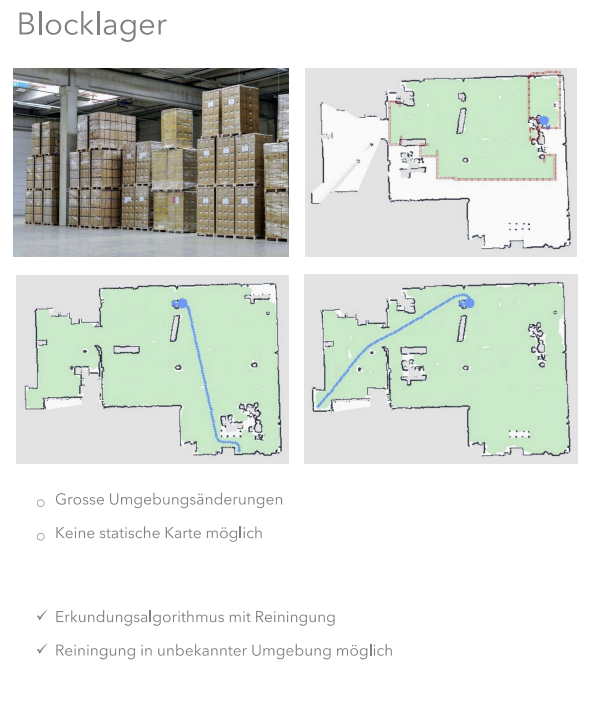
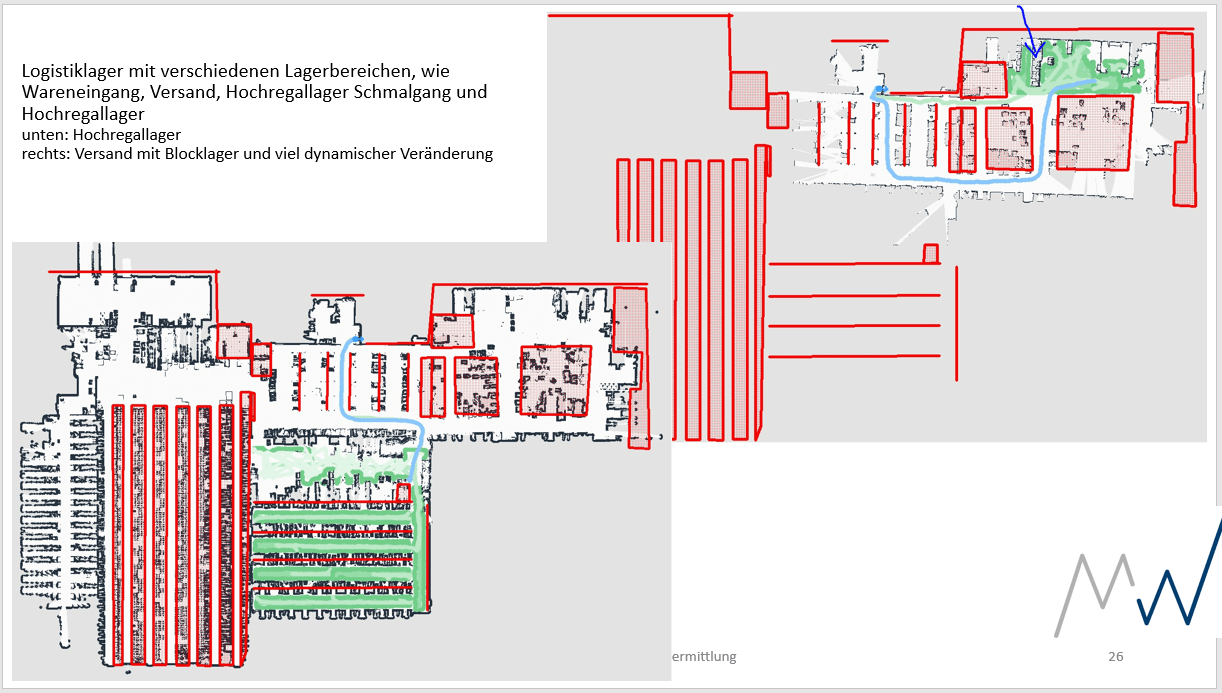
Logistik Blocklager
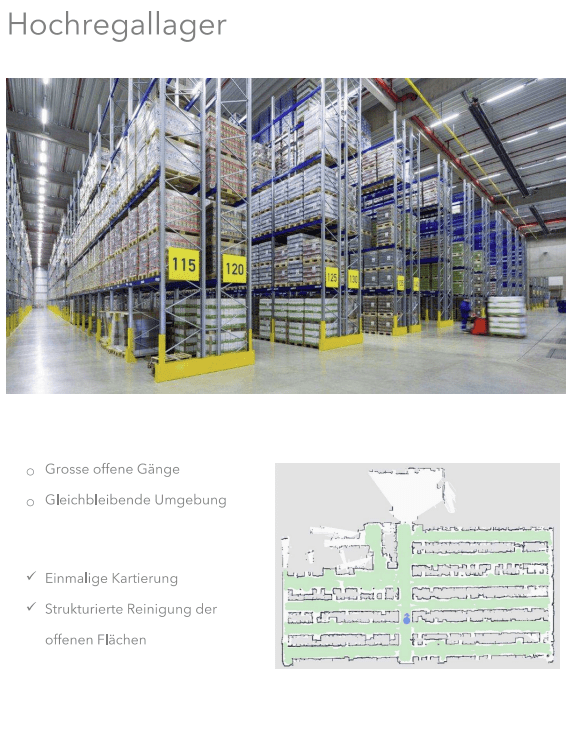
Logistik Hochregallager
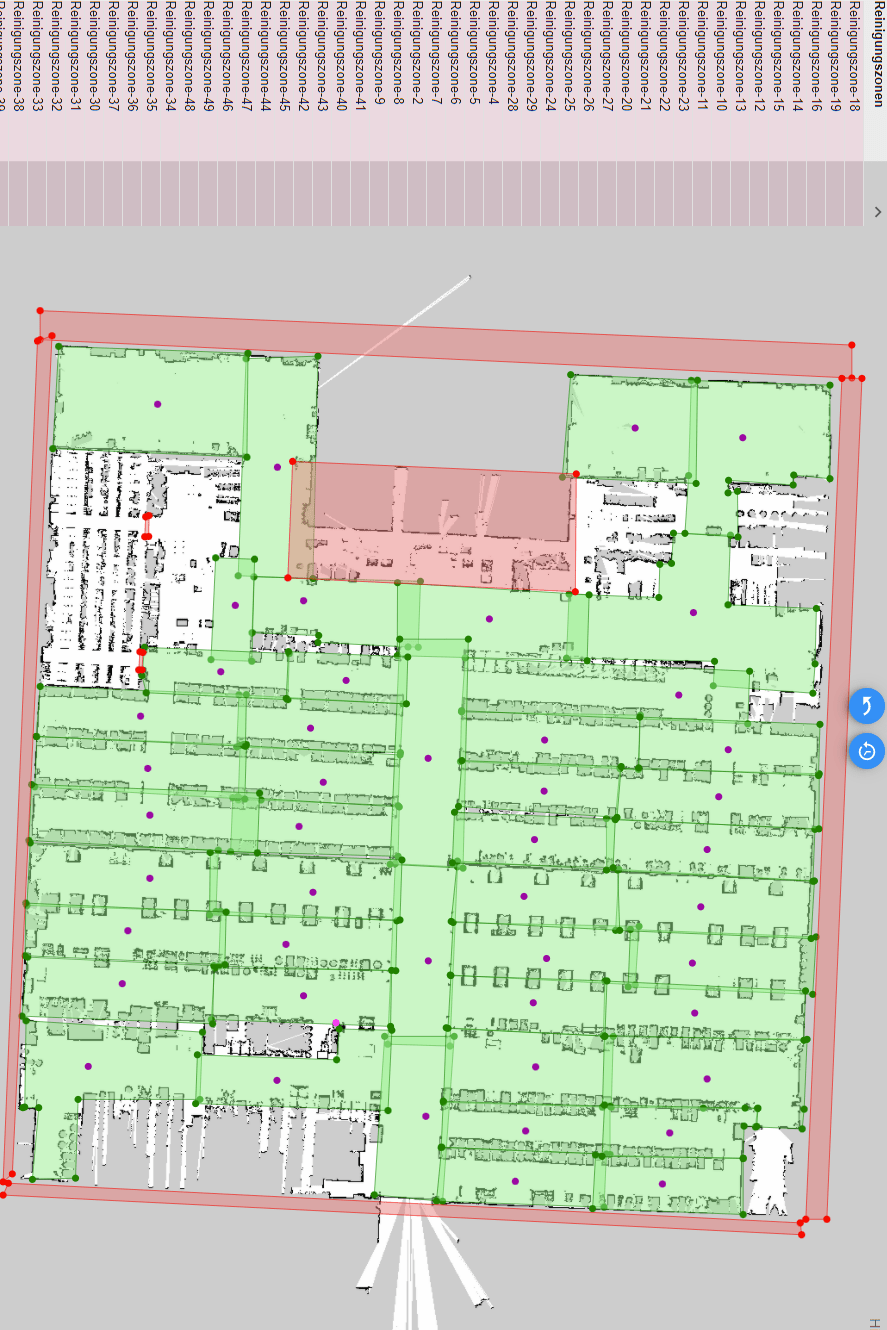
Kartographie und Reinigungszonenplan - Halle mit ca. 8000m²
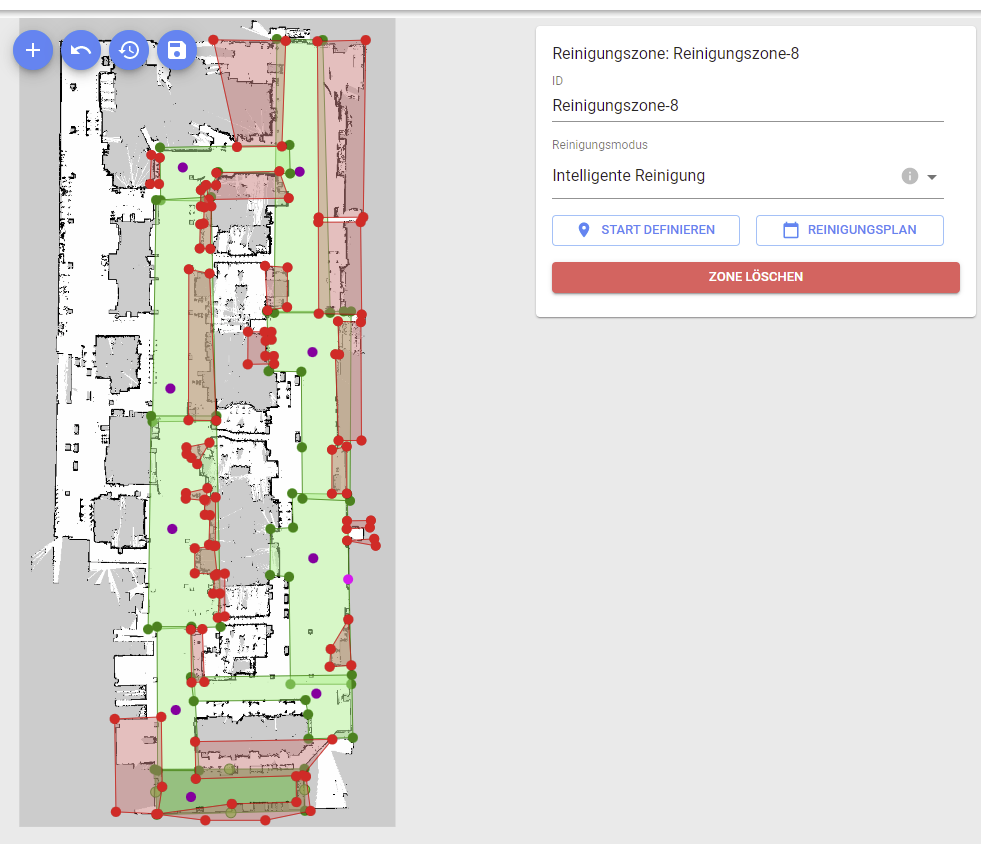
Kartographierte Halle mit Zonenplan
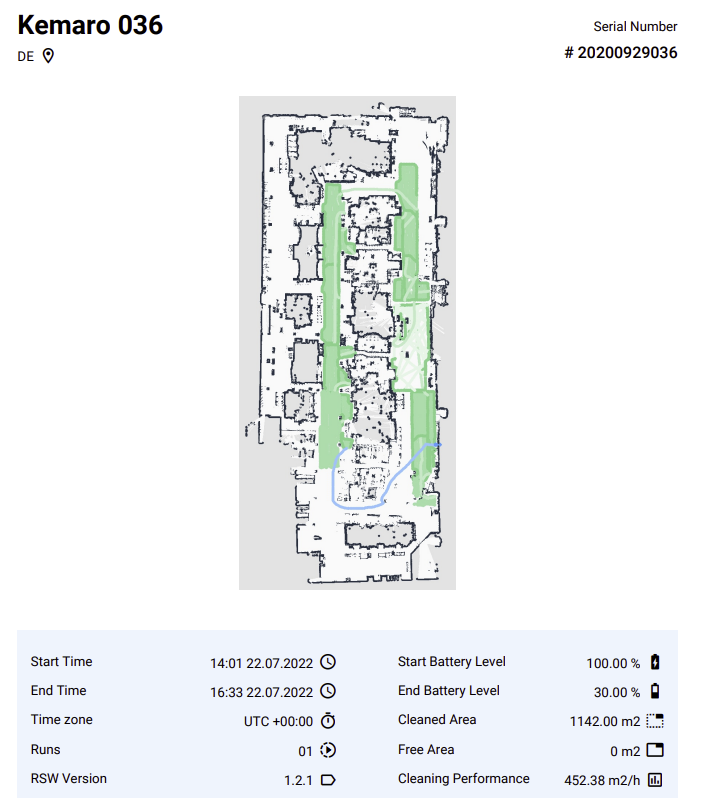
Reinigungsreport linker Halle mit verschiedenen Reinigungsmodi
Reinigungsreport 8000m² Halle bei verschiedene Anforderungen
Details und Sensortechnik
K900 technische Daten
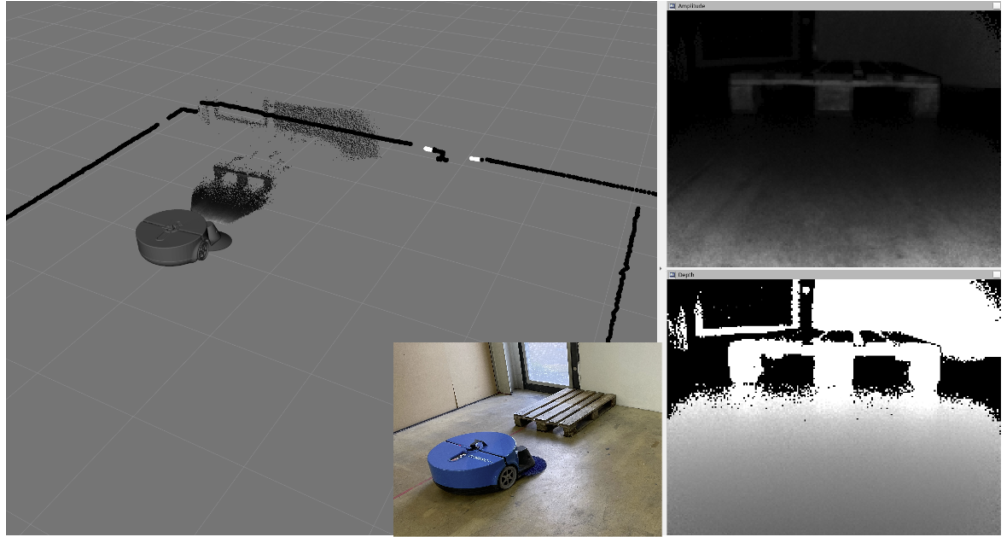
LiDAR und wie der Roboter seine Umgebung sieht:
Das Akronym steht für „Light Detection and Ranging” “Lichterkennung und Entfernungsmessung“ ähnlich Radar (Radio Detection and Ranging) jedoch mit dem Unterschied, dass Laserimpulse statt Funkwellen verwendet werden. Das Messprinzip ist das Gleiche. Es werden ungefährliche, gleichgerichtete und gleichfarbige Laserimpulse auf ca. 30cm über dem Boden vom Sensor versendet… zum Bericht↑
LiDAR und wie der Roboter seine Umgebung sieht
Autonome Roboter Orientierung durch Lokalisation und Kartenerstellung
„Mapping und SLAM-Technik“
Mapping, also das Erstellen der Karte, basiert auf dem “SLAM” Vorgang, was für “simultaneous localisation and mapping” steht. Damit wird das Verfahren in der Robotik bezeichnet, bei dem ein mobiler Roboter gleichzeitig eine Karte seiner Umgebung erstellen und seine räumliche Lage innerhalb dieser Karte schätzen muss… zum Bericht↑
„Die Prinzipien des 3D-Sensors“
Die Funktionsweise unseres 3D-Sensors unterscheidet sich maßgeblich von herkömmlichen Kameras. Der Sensor fokusiert sich darauf, dem Roboter einen räumlichen Eindruck zu vermitteln. Lichtreflektierende Oberflächen liefern Daten über Form und Größe, diese Daten sind im Abgleich des LiDAR entscheidend für das Erkennen eines Hindernisses oder Bereitschaft zum Einkehren von Schmutz… zum Bericht↑